May 19, 2021
Ônibus todo-around cego sistema de detecção de mancha
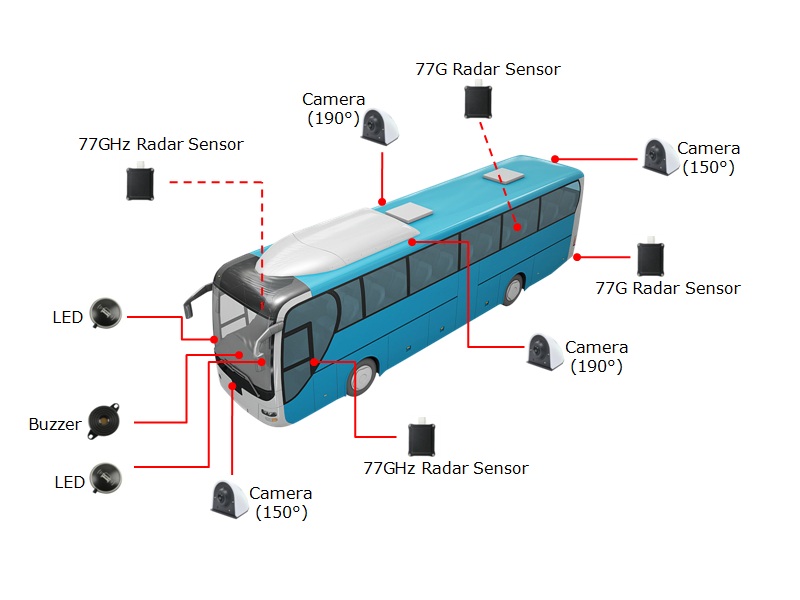
Os motoristas de ônibus são sempre difíceis de observar claramente a situação em torno do ônibus Porque seu longo corpo. O sistema de detecção de ponto cego todo pode ajudar a resolver isso problema. O sistema pode detectar a situação nas manchas cegas dos lados esquerdo e direito do ônibus através dos radares de ondas milímetros, se houver outros veículos que entrem na área detectada, além de alarme de alarme de lâmpada LED e alarme de campainha, o radar acionará a câmera relacionada para capturar As condições da estrada e a saída de vídeo em tempo real na tela de exibição de ônibus como bem. de acordo com estes Alarmes e vídeo em tempo real, o motorista de ônibus pode ajustar o comportamento de condução com antecedência para reduzir o acidente de trânsito quando dirigindo. Vantagens: Todos os climas trabalhando, incluindo dia chuvoso, dia nevado, dia nebuloso, ou à noite etc.Disponível para má visão Ambiente (em fraco ou forte luz). Adequado para estrada baixa e alta velocidade Condições. Especificações: configuração do sistema 4 sensor de radar +2 lampadas de led +1 campainha padrão ISO17387 Precisão do intervalo de detecção ± 0.65m (típico) Caixa máxima de detecçãoveículo (0.3m ~ 50m ) motocicleta (0.3m ~ 30m ) pedestre (0.3m ~ 15m ) Front Frequency Front End (RFFPE) 2TX 4RX Ângulo horizontal de antena para cada sensor de radar 120 ° antena Ângulo vertical para cada sensor de radar 30 ° tempo de resposta 50ms Taxa de identificação de velocidade ± 0,25m / s Antena transmite potência de saída 12dbm precisão do alarme do sistema Veículo ≥ 95% Motocicleta≥ 95% Pedestre≥ 95% Tipo de alarme Tipo 1: LED lâmpada ligada Tipo 2: LED flashes lâmpadas + Buzzer Beeps. nível impermeável IP67 Consumo atual ≤ 1100mA @ 12VDC Tensão de operação 9. ~ 16VDC (típico dc 12v) temperatura de operação -40 ℃ ~ 85. ℃ temperatura de armazenamento -40 ℃ ~ 95. ℃ Frequência de operação. 77. ~ 81 GHz. Funções: Quando Há obstáculos detectados em diferentes áreas, o sistema desencadeará a câmera relacionada para capturar a exibição da área e exibirá o vídeo em tempo real na tela do ônibus Enquanto isso, o sistema irá avisar o motorista com lâmpada LED e Buzzer. I. ponto cego Detecção (BSD) Quando Há obstáculos detectados pelo sensor de radar em BSD área, o sistema irá alertar o motorista como Siga: Obstáculo é detectado à esquerda Área: 1) LED LAMP ligado; Se o sinal da esquerda estiver ligado, a lâmpada LED esquerda pisca e bilhete de bilhetes ; 2) Vista frontal e câmera à esquerda, a imagem da vista frontal e a imagem da esquerda serão exibidas na tela de ônibus Tela. Obstáculo é detectado à direita Área: 1) LED LAMP ligado; Se o sinal de volta à direita estiver ligado, a lâmpada LED direita pisca e bilhete de campainha ; 2) Vista frontal e câmera à direita Trabalho, a imagem da vista frontal e a imagem à direita serão exibidas na tela de ônibus Tela. II. Lane mudando Assistente (LCA) Quando Há obstáculos detectados pelo sensor de radar em LCA área, o sistema irá alertar o ...
Veja mais



 Rede IPv6 suportada
Rede IPv6 suportada